|
NLMech
0.1.0
|
|
NLMech
0.1.0
|
A class for mapping and quadrature related operations for linear tetrahedron element. More...
#include <tetElem.h>
Public Member Functions | |
| double | elemSize (const std::vector< util::Point3 > &nodes) override |
| Returns the volume of element. More... | |
| std::vector< std::vector< double > > | getDerShapes (const util::Point3 &p, const std::vector< util::Point3 > &nodes) override |
| Returns the values of derivative of shape function at point p. More... | |
| std::vector< fe::QuadData > | getQuadDatas (const std::vector< util::Point3 > &nodes) override |
| Get vector of quadrature data. More... | |
| std::vector< fe::QuadData > | getQuadPoints (const std::vector< util::Point3 > &nodes) override |
| Get vector of quadrature data. More... | |
| std::vector< double > | getShapes (const util::Point3 &p, const std::vector< util::Point3 > &nodes) override |
| Returns the values of shape function at point p. More... | |
| void | print (int nt=0, int lvl=0) const |
| Prints the information about the instance of the object. More... | |
| std::string | printStr (int nt=0, int lvl=0) const |
| Returns the string containing information about the instance of the object. More... | |
| TetElem (size_t order) | |
| Constructor. More... | |
 Public Member Functions inherited from fe::BaseElem Public Member Functions inherited from fe::BaseElem | |
| BaseElem (size_t order, size_t element_type) | |
| Constructor. More... | |
| size_t | getElemType () |
| Get element type. More... | |
| size_t | getNumQuadPoints () |
| Get number of quadrature points in the data. More... | |
| size_t | getQuadOrder () |
| Get order of quadrature approximation. More... | |
| void | print (int nt=0, int lvl=0) const |
| Prints the information about the instance of the object. More... | |
| std::string | printStr (int nt=0, int lvl=0) const |
| Returns the string containing information about the instance of the object. More... | |
Private Member Functions | |
| std::vector< std::vector< double > > | getDerShapes (const util::Point3 &p) override |
| Returns the values of derivative of shape function at point p on reference element. More... | |
| double | getJacobian (const util::Point3 &p, const std::vector< util::Point3 > &nodes, std::vector< std::vector< double >> *J) override |
Computes the Jacobian of map  . More... . More... | |
| std::vector< double > | getShapes (const util::Point3 &p) override |
| Returns the values of shape function at point p on reference element. More... | |
| void | init () override |
| Compute the quadrature points for triangle element. | |
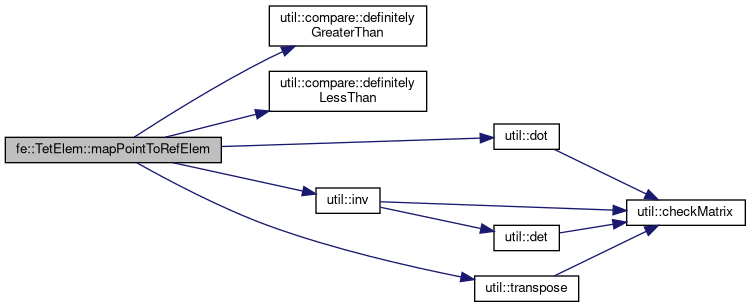
| util::Point3 | mapPointToRefElem (const util::Point3 &p, const std::vector< util::Point3 > &nodes) override |
| Maps point p in a given element to the reference element. More... | |
A class for mapping and quadrature related operations for linear tetrahedron element.
The reference tetrahedron element  is given by vertices
is given by vertices  .
.
 are
are
![\[N^0_1(\xi, \eta, \zeta) = 1- \xi - \eta - \zeta, \quad N^0_2(\xi, \eta, \zeta) = \xi, \quad N^0_3(\xi, \eta, \zeta) = \eta, \quad N^0_4(\xi, \eta, \zeta) = \zeta. \]](form_118.png)
![\[\frac{d N^0_1(\xi, \eta, \zeta)}{d\xi} = -1, \, \frac{d N^0_1(\xi, \eta, \zeta) }{d\eta} = -1, \, \frac{d N^0_1(\xi, \eta, \zeta) }{d\zeta} = -1, \]](form_119.png)
![\[\frac{d N^0_2(\xi, \eta, \zeta)}{d\xi} = 1, \, \frac{d N^0_2(\xi, \eta, \zeta)}{d\eta} = 0, \, \frac{d N^0_2(\xi, \eta, \zeta)}{d\zeta} = 0, \]](form_120.png)
![\[\frac{d N^0_2(\xi, \eta, \zeta)}{d\xi} = 0, \, \frac{d N^0_2(\xi, \eta, \zeta)}{d\eta} = 1, \, \frac{d N^0_2(\xi, \eta, \zeta)}{d\zeta} = 0, \]](form_121.png)
![\[\frac{d N^0_2(\xi, \eta, \zeta)}{d\xi} = 0, \, \frac{d N^0_2(\xi, \eta, \zeta)}{d\eta} = 0, \, \frac{d N^0_2(\xi, \eta, \zeta)}{d\zeta} = 1. \]](form_122.png)
 is given by
is given by
![\[ x(\xi, \eta, \zeta) = \sum_{i=1}^4 N^0_i(\xi, \eta, \zeta) v^i_x, \quad y (\xi, \eta, \zeta) = \sum_{i=1}^4 N^0_i(\xi, \eta, \zeta) v^i_y, \quad z (\xi, \eta, \zeta) = \sum_{i=1}^4 N^0_i(\xi, \eta, \zeta) v^i_z \]](form_123.png)
 are vertices of element
are vertices of element  . is given by
. is given by
![\[ J = \left[ { \begin{array}{ccc} \frac{dx}{d\xi} &\frac{dy}{d\xi} &\frac{dz}{d\xi} \\ \frac{dx}{d\eta} & \frac{dy}{d\eta} &\frac{dz}{d\eta} \\ \frac{dx}{d\zeta} & \frac{dy}{d\zeta} &\frac{dz}{d\zeta} \\ \end{array} } \right] \]](form_124.png)
![\[ det(J) = \frac{dx}{d\xi} (\frac{dy}{d\eta} \times \frac{dz}{d\zeta} - \frac{dy}{d\zeta}\times \frac{dz}{d\eta}) - \frac{dy}{d\xi} (\frac{dx}{d\eta} \times \frac{dz}{d\zeta} - \frac{dx}{d\zeta}\times \frac{dz}{d\eta}) + \frac{dz}{d\xi} (\frac{dx}{d\eta} \times \frac{dy}{d\zeta} - \frac{dx}{d\zeta}\times \frac{dy}{d\eta}). \]](form_125.png)
 ) is constant. For linear tetrahedron elements, we simply have
) is constant. For linear tetrahedron elements, we simply have
![\[ \frac{dx}{d\xi} = v^2_x - v^1_x, \quad \frac{dx}{d\eta} = v^3_x - v^1_x, \quad \frac{dx}{d\zeta} = v^4_x - v^1_x, \]](form_126.png)
![\[ \frac{dy}{d\xi} = v^2_y - v^1_y, \quad \frac{dy}{d\eta} = v^3_y - v^1_y, \quad \frac{dy}{d\zeta} = v^4_y - v^1_y, \]](form_127.png)
![\[ \frac{dz}{d\xi} = v^2_z - v^1_z, \quad \frac{dz}{d\eta} = v^3_z - v^1_z, \quad \frac{dz}{d\zeta} = v^4_z - v^1_z \]](form_128.png)
 .
. for linear tetrahedron element can be easily derived. The derivation of the map is provided below:
for linear tetrahedron element can be easily derived. The derivation of the map is provided below:From map  we have
we have
![\[ x = \sum_{i=1}^4 N^0_i(\xi, \eta, \zeta) v^i_x, \quad y = \sum_{i=1}^4 N^0_i(\xi, \eta, \zeta) v^i_y, \quad z = \sum_{i=1}^4 N^0_i(\xi, \eta, \zeta) v^i_z. \]](form_131.png)
Substituting formula for  in above to get
in above to get
![\[ x = (1 - \xi - \eta - \zeta) v^1_x + \xi v^2_x + \eta v^3_x + \zeta v^4_x, \quad y = (1 - \xi - \eta - \zeta) v^1_y + \xi v^2_y + \eta v^3_y + \zeta v^4_y, \quad z = (1 - \xi - \eta - \zeta) v^1_z + \xi v^2_z + \eta v^3_z + \zeta v^4_z \]](form_132.png)
or
![\[ x - v^1_x = \xi (v^2_x - v^1_x) + \eta (v^3_x - v^1_x) + \zeta (v^4_x - v^1_x), \quad y - v^1_y = \xi (v^2_y - v^1_y) + \eta (v^3_y - v^1_y) + \zeta (v^4_y - v^1_y), \quad z - v^1_z = \xi (v^2_z - v^1_z) + \eta (v^3_z - v^1_z) + \zeta (v^4_z - v^1_z). \]](form_133.png)
Writing above in matrix form, we have
![\[ \left[ {\begin{array}{c} x - v^1_x \\ y - v^1_y \\ z - v^1_z \end{array}}\right] = \left[ {\begin{array}{ccc} v^2_x - v^1_x & v^3_x - v^1_x & v^4_x - v^1_x\\ v^2_y - v^1_y & v^3_y - v^1_y & v^3_y - v^1_y \\ v^2_z - v^1_z & v^3_z - v^1_z & v^3_z - v^1_z \end{array}}\right] \, \left[ {\begin{array}{c} \xi \\ \eta \\ \zeta \end{array}}\right]. \]](form_134.png)
Denoting the matrix as 
![\[ B = \left[ {\begin{array}{ccc} v^2_x - v^1_x & v^3_x - v^1_x & v^4_x - v^1_x\\ v^2_y - v^1_y & v^3_y - v^1_y & v^4_y - v^1_y \\ v^2_z - v^1_z & v^3_z - v^1_z & v^4_z - v^1_z \end{array}}\right] \]](form_136.png)
. Note that is transpose of Jacobin of map  therefore
therefore  . Inverse of
. Inverse of  is
is
![\[ C := B^{-1} = \frac{1}{det(B)} \left[ {\begin{array}{ccc} B_{22}B_{33} - B_{32}B_{23} & B_{13}B_{32} - B_{33}B_{12} & B_{12}B_{23} - B_{22}B_{13} \\ B_{23}B_{31} - B_{33}B_{21} & B_{11}B_{33} - B_{31}B_{13} & B_{13}B_{21} - B_{23}B_{11} \\ B_{21}B_{32} - B_{31}B_{22} & B_{12}B_{31} - B_{32}B_{11} & B_{11}B_{22} - B_{21}B_{12} \\ \end{array}}\right]. \]](form_140.png)
With  we have inverse map given by
we have inverse map given by
![\[ \xi(x,y,z) = C_{11} (x - v^1_x) + C_{12} (y - v^1_y) + C_{13} (z - v^1_z), \quad \eta(x,y,z) = C_{21} (x - v^1_x) + C_{22} (y - v^1_y) + C_{23} (z - v^1_z), \quad \zeta (x,y,z) = C_{31} (x - v^1_x) + C_{32} (y - v^1_y) + C_{33} (z - v^1_z). \]](form_142.png)
|
explicit |
Constructor.
| order | Order of quadrature point approximation |
|
overridevirtual |
Returns the volume of element.
If tetrahedron is given by points  then the volume is
then the volume is
![\[ volume(T) =\frac{1}{3!} \left\vert \left[ {\begin{array}{cccc} v^1_x & v^1_y & v^1_z & 1 \\ v^2_x & v^2_y & v^2_z & 1 \\ v^3_x & v^3_y & v^3_z & 1 \\ v^4_x & v^4_y & v^4_z & 1 \\ \end{array}}\right] \right\vert \]](form_143.png)
where  are the x, y, z component of point
are the x, y, z component of point  .
.
Note that volume and Jacobian of map are related as
![\[ volume(T) = volume(T^0) \times det(J). \]](form_144.png)
Here,  .
.
| nodes | Vertices of element |
Implements fe::BaseElem.
|
overrideprivatevirtual |
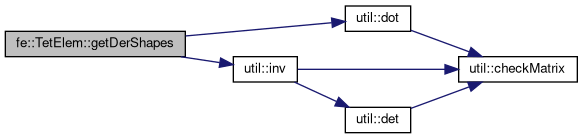
Returns the values of derivative of shape function at point p on reference element.
| p | Location of point |
Implements fe::BaseElem.
|
overridevirtual |
Returns the values of derivative of shape function at point p.
Below, we present the derivation of the formula:
We are interested in  ,
,  and
and  . By using the map
. By using the map  we have
we have
![\[ N^0_i(\xi, \eta, \zeta) = N_i(x(\xi,\eta,\zeta), y(\xi, \eta,\eta), z(\xi, \eta,\eta)) \]](form_150.png)
and therefore we can write
![\[ \frac{\partial N^0_i(\xi, \eta, \zeta)}{\partial \xi} = \frac{\partial N_i}{\partial x} \frac{\partial x}{\partial \xi} + \frac{\partial N_i}{\partial y} \frac{\partial y}{\partial \xi} + \frac{\partial N_i}{\partial z} \frac{\partial z}{\partial \xi}, \]](form_151.png)
![\[ \frac{\partial N^0_i(\xi, \eta, \zeta)}{\partial \eta} = \frac{\partial N_i}{\partial x} \frac{\partial x}{\partial \eta} + \frac{\partial N_i}{\partial y} \frac{\partial y}{\partial \eta} + \frac{\partial N_i}{\partial z} \frac{\partial z}{\partial \eta} \]](form_152.png)
and
![\[ \frac{\partial N^0_i(\xi, \eta, \zeta)}{\partial \zeta} = \frac{\partial N_i}{\partial x} \frac{\partial x}{\partial \zeta} + \frac{\partial N_i}{\partial y} \frac{\partial y}{\partial \zeta} + \frac{\partial N_i}{\partial z} \frac{\partial z}{\partial \zeta} \]](form_153.png)
which can be written in the matrix form as
![\[ \left[ {\begin{array}{c} \frac{\partial N^0_i}{\partial \xi} \\ \frac{\partial N^0_i}{\partial \eta} \\ \frac{\partial N^0_i}{\partial \zeta} \end{array}}\right] = \left[ { \begin{array}{ccc} \frac{dx}{d\xi} &\frac{dy}{d\xi} &\frac{dz}{d\xi} \\ \frac{dx}{d\eta} & \frac{dy}{d\eta} &\frac{dz}{d\eta} \\ \frac{dx}{d\zeta} & \frac{dy}{d\zeta} &\frac{dz}{d\zeta} \\ \end{array} } \right] \, \left[ {\begin{array}{c} \frac{\partial N_i}{\partial x} \\ \frac{\partial N_i}{\partial y} \\ \frac{\partial N_i}{\partial z}\end{array}}\right]. \]](form_154.png)
The matrix is the Jacobian matrix  and can be computed easily if vertices of elements are known. Using
and can be computed easily if vertices of elements are known. Using  we have following formula for derivatives of the shape function
we have following formula for derivatives of the shape function
![\[ \left[ {\begin{array}{c} \frac{\partial N_i}{\partial x} \\ \frac{\partial N_i}{\partial y} \\ \frac{\partial N_i}{\partial z}\end{array}}\right] = J^{-1} \left[ {\begin{array}{c} \frac{\partial N^0_i}{\partial \xi} \\ \frac{\partial N^0_i}{\partial \eta} \\ \frac{\partial N^0_i}{\partial \zeta}\end{array}}\right]. \]](form_156.png)
Here, derivatives  ,
,  and
and  correspond to reference element and are easy to compute.
correspond to reference element and are easy to compute.
| p | Location of point |
| nodes | Vertices of element |
Reimplemented from fe::BaseElem.
|
overrideprivatevirtual |
Computes the Jacobian of map .
| p | Location of point in reference element |
| nodes | Vertices of element |
| J | Matrix to store the Jacobian (if not nullptr) |
Implements fe::BaseElem.

|
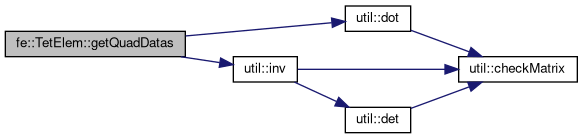
overridevirtual |
Get vector of quadrature data.
Given element vertices, this method returns the list of quadrature point and essential quantities at quadrature points. Here, order of quadrature approximation is set in the constructor. List of data
Let is the given tetrahedron with vertices and let is the reference tetrahedron.
, and then we use the map to map the points on reference tetrahedron to the given triangle .. Suppose  is the quadrature weight associated to quadrature point
is the quadrature weight associated to quadrature point  , then the quadrature point
, then the quadrature point  associated to the mapped point
associated to the mapped point  is given by
is given by
![\[ w_q = w^0_q * det(J) \]](form_160.png)
is the determinant of the Jacobian of map  .
. associated to at the quadrature point
associated to at the quadrature point  using formula
using formula
![\[ N_i(x(\xi_q, \eta_q), y(\xi_q, \eta_q)) = N^0_i(\xi_q, \eta_q). \]](form_115.png)
 associated to , we use the relation between derivatives of shape function in and described in fe::TetElem::getDerShapes.
associated to , we use the relation between derivatives of shape function in and described in fe::TetElem::getDerShapes.| nodes | Vector of vertices of an element |
Implements fe::BaseElem.
|
overridevirtual |
Get vector of quadrature data.
Given element vertices, this method returns the list of quadrature point and essential quantities at quadrature points. Here, order of quadrature approximation is set in the constructor. List of data
This function is lite version of fe::TetElem::getQuadDatas.
| nodes | Vector of vertices of an element |
Implements fe::BaseElem.
|
overrideprivatevirtual |
Returns the values of shape function at point p on reference element.
| p | Location of point |
Implements fe::BaseElem.
|
overridevirtual |
Returns the values of shape function at point p.
We first map the point p in to reference tetrahedron using fe::TetElem::mapPointToRefElem and then compute shape functions at the mapped point using fe::TetElem::getShapes(const util::Point3 &).
| p | Location of point |
| nodes | Vertices of element |
Reimplemented from fe::BaseElem.
|
overrideprivatevirtual |
Maps point p in a given element to the reference element.
Let  are three vertices of triangle
are three vertices of triangle  and let
and let  is the reference triangle. Following the introduction to fe::TriElem, the map
is the reference triangle. Following the introduction to fe::TriElem, the map  to
to  is given by
is given by
![\[ \xi = C_{11} (x - v^1_x) + C_{12} (y - v^1_y), \quad \eta = C_{21} (x - v^1_x) + C_{22} (y - v^1_y). \]](form_165.png)
 is the inverse of matrix
is the inverse of matrix
![\[ B = \left[ {\begin{array}{cc} v^2_x - v^1_x & v^3_x - v^1_x \\ v^2_y - v^1_y & v^3_y - v^1_y \end{array}}\right], \]](form_167.png)
i.e.
![\[ C := B^{-1} = \frac{1}{(v^2_x - v^1_x)(v^3_y - v^1_y) - (v^3_x - v^1_x) (v^2_y - v^1_y)} \left[ {\begin{array}{cc} v^3_y - v^1_y & -(v^3_x - v^1_x) \\ -(v^2_y - v^1_y) & v^2_x - v^1_x \end{array}}\right]. \]](form_168.png)
If mapped point  does not satisfy following conditions
does not satisfy following conditions
![\[ 0\leq \xi, \eta \]](form_170.png)
![\[ \xi \leq 1 - \eta \quad (or\, equivalently) \quad \eta \leq 1 - \xi \]](form_171.png)
 does not belong to the reference triangle or equivalently point
does not belong to the reference triangle or equivalently point  does not belong to the triangle and the method issues error. Otherwise the method returns point .
does not belong to the triangle and the method issues error. Otherwise the method returns point .| p | Location of point |
| nodes | Vertices of element |
Reimplemented from fe::BaseElem.
|
inline |
Prints the information about the instance of the object.
| nt | Number of tabs to append before each line of string |
| lvl | Level of information sought (higher level means more information) |

| std::string fe::TetElem::printStr | ( | int | nt = 0, |
| int | lvl = 0 |
||
| ) | const |
Returns the string containing information about the instance of the object.
| nt | Number of tabs to append before each line of string |
| lvl | Level of information sought (higher level means more information) |
Referenced by print().

